 Get in touch
Get in touch

1. บทนำ: การแยกโครงสร้างแรงม้าของมอเตอร์เหนี่ยวนำกระแสสลับ มอเตอร์เหนี่ยวนำกระแสสลับเป็นหนึ่งในม...
อ่านเพิ่มเติมข่าว
2025-09-23
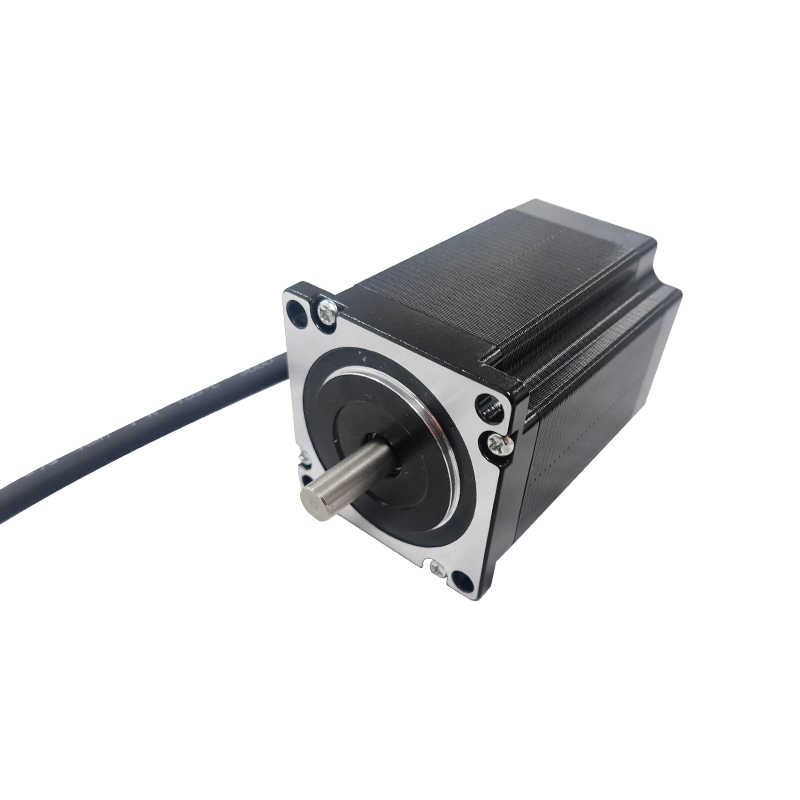
สเต็ปเปอร์มอเตอร์ถือเป็นรากฐานสำคัญของการควบคุมการเคลื่อนไหวสมัยใหม่ โดยให้ตำแหน่งที่แม่นยำและทำซ้ำได้โดยไม่ต้องใช้ระบบป้อนกลับที่ซับซ้อน มอเตอร์ไฟฟ้าซิงโครนัสไร้แปรงถ่านเหล่านี้แปลงพัลส์ดิจิทัลให้เป็นการหมุนเพลาเชิงกลที่แม่นยำ โดยเคลื่อนที่เป็นขั้นๆ คุณลักษณะนี้ทำให้เป็นสิ่งที่ขาดไม่ได้ในการใช้งานตั้งแต่อุปกรณ์อิเล็กทรอนิกส์สำหรับผู้บริโภคไปจนถึงเครื่องจักรอุตสาหกรรมที่มีความซับซ้อน อย่างไรก็ตาม เมื่อการใช้งานต้องการไม่เพียงแต่ความแม่นยำเท่านั้น แต่ยังต้องการแรงที่สำคัญในการเคลื่อนย้ายของหนัก เอาชนะแรงเสียดทาน หรือรักษาตำแหน่งภายใต้ความเครียด สเต็ปเปอร์มอเตอร์มาตรฐานอาจไม่เพียงพอ นี่คือที่มาของหมวดหมู่ของ สเต็ปเปอร์มอเตอร์แรงบิดสูง กลายเป็นเรื่องสำคัญ
ในบริบทของสเต็ปเปอร์มอเตอร์ 'แรงบิดสูง' หมายถึงความสามารถของมอเตอร์ในการสร้างแรงหมุนที่เหนือกว่าเมื่อเปรียบเทียบกับมอเตอร์มาตรฐานที่มีขนาดหรือเฟรมทางกายภาพใกล้เคียงกัน แรงบิดเป็นการวัดพื้นฐานของความแข็งแกร่งของมอเตอร์ โดยกำหนดปริมาณโหลดที่มอเตอร์สามารถเร่งความเร็ว ขับเคลื่อน และยึดอยู่กับที่ ความสำคัญของแรงบิดสูงไม่สามารถกล่าวเกินจริงได้ในการใช้งานที่มีความต้องการสูง ตัวอย่างเช่น ในวิทยาการหุ่นยนต์ แรงบิดสูงเป็นสิ่งจำเป็นสำหรับแอคชูเอเตอร์ร่วมที่ต้องรองรับน้ำหนักของแขนหุ่นยนต์และน้ำหนักบรรทุก ในการตัดเฉือน ซีเอ็นซี ช่วยให้มั่นใจได้ว่าเครื่องมือตัดสามารถเคลื่อนที่ผ่านวัสดุได้อย่างแม่นยำโดยไม่ต้องหยุดนิ่ง โดยพื้นฐานแล้ว สเต็ปเปอร์มอเตอร์แรงบิดสูงเชื่อมช่องว่างระหว่างความต้องการความแม่นยำระบุตำแหน่งและความต้องการพลังงานกลจำนวนมาก ทำให้เกิดนวัตกรรมในสาขาที่ต้องการทั้งสองอย่าง
หากต้องการชื่นชมข้อดีของสเต็ปเปอร์มอเตอร์แรงบิดสูงอย่างเต็มที่ ก่อนอื่นต้องเข้าใจหลักการพื้นฐานที่ควบคุมสเต็ปเปอร์มอเตอร์ทั้งหมดก่อน แตกต่างจากมอเตอร์กระแสตรงมาตรฐานที่หมุนอย่างต่อเนื่องเมื่อมีการจ่ายแรงดันไฟฟ้า สเต็ปเปอร์มอเตอร์จะเคลื่อนที่โดยเพิ่มทีละมุมคงที่ซึ่งเรียกว่าสเต็ป โครงสร้างภายในของมอเตอร์ประกอบด้วยส่วนที่อยู่กับที่ (สเตเตอร์) ที่มีขดลวดแม่เหล็กไฟฟ้าหลายขดลวด และส่วนที่หมุนได้ (โรเตอร์) โดยทั่วไปจะประกอบด้วยแม่เหล็กถาวรหรือแกนกลางที่แม่เหล็กซึมเข้าไปได้ ด้วยการเพิ่มพลังงานให้กับขดลวดสเตเตอร์ในลำดับเฉพาะ สนามแม่เหล็กจะถูกสร้างขึ้นเพื่อดึงดูดโรเตอร์ ทำให้โรเตอร์อยู่ในแนวเดียวกับสนาม และด้วยเหตุนี้จึงหมุนด้วยมุมที่แม่นยำกับแต่ละพัลส์ที่ได้รับจากตัวควบคุม
สเต็ปเปอร์มอเตอร์มีหลายประเภทพื้นฐาน โดยแต่ละประเภทมีลักษณะการทำงานที่แตกต่างกัน สเต็ปเปอร์มอเตอร์แม่เหล็กถาวร (PM) มีโรเตอร์ที่มีแม่เหล็กถาวร ให้แรงบิดในการยึดเกาะที่ดีและมุมขั้นที่ค่อนข้างใหญ่ แต่มักจะมีความละเอียดและแรงบิดต่ำกว่าเมื่อเทียบกับประเภทอื่นๆ สเต็ปเปอร์มอเตอร์แบบรีลัคแทนซ์แบบแปรผัน (VR) มีโรเตอร์เหล็กอ่อนที่สอดคล้องกับเส้นทางสนามแม่เหล็กที่ไม่เต็มใจน้อยที่สุด (ความต้านทานแม่เหล็ก) สิ่งเหล่านี้พบได้น้อยในปัจจุบัน ประเภทที่แพร่หลายมากที่สุด โดยเฉพาะอย่างยิ่งในการใช้งานที่มีประสิทธิภาพสูงคือ ไฮบริดสเต็ปเปอร์มอเตอร์ - การออกแบบนี้ผสมผสานหลักการของมอเตอร์ PM และ VR โดยใช้โรเตอร์แม่เหล็กถาวรกับฟันที่ทำปฏิกิริยากับสเตเตอร์แม่เหล็กไฟฟ้าแบบฟันเฟือง การกำหนดค่าแบบไฮบริดนี้ช่วยให้มีมุมขั้นที่เล็กมาก แรงบิดที่สูง และความแม่นยำของตำแหน่งที่ยอดเยี่ยม ทำให้เป็นการออกแบบที่โดดเด่นสำหรับ สเต็ปเปอร์มอเตอร์แรงบิดสูง การใช้งาน
คำศัพท์สำคัญหลายคำจำเป็นสำหรับการทำความเข้าใจข้อกำหนดจำเพาะของสเต็ปเปอร์มอเตอร์ ที่ มุมก้าว กำหนดระยะเชิงมุมที่เพลาหมุนด้วยแต่ละพัลส์เดี่ยว โดยทั่วไป 1.8° (200 สเต็ป/รอบ) หรือ 0.9° (400 สเต็ป/รอบ) สำหรับมอเตอร์ไฮบริด ถือแรงบิด คือแรงบิดสูงสุดที่มอเตอร์สามารถออกได้เมื่ออยู่กับที่โดยมีขดลวดหมุนอยู่ ซึ่งเป็นพิกัดวิกฤตสำหรับ สเต็ปเปอร์มอเตอร์แรงบิดสูง เนื่องจากเป็นการบ่งบอกถึงความสามารถในการรักษาตำแหน่งต่อแรงภายนอก ในทางกลับกัน แรงบิดย้อน คือ แรงบิดที่เกิดขึ้นเมื่อขดลวดมอเตอร์ไม่ได้รับพลังงาน ซึ่งเกิดจากอันตรกิริยาทางแม่เหล็กระหว่างโรเตอร์แม่เหล็กถาวรกับสเตเตอร์ สิ่งนี้ให้แรงยึดติดเล็กน้อย
ในทางกล แรงบิดคือการวัดแรงหมุนที่กระทำกับวัตถุ สำหรับสเต็ปเปอร์มอเตอร์ มันคือแรงหมุนที่เพลามอเตอร์สามารถสร้างเพื่อทำให้เกิดหรือต้านทานการเคลื่อนไหว มันคล้ายคลึงกับแนวคิดเรื่องแรงในระบบเชิงเส้น แรงบิดสูงจึงบ่งบอกถึงความสามารถของมอเตอร์ในการสร้างแรงหมุนที่แข็งแกร่ง นี่เป็นสิ่งสำคัญยิ่งสำหรับการใช้งานที่เกี่ยวข้องกับการเร่งภาระหนัก กลไกการขับเคลื่อนที่มีแรงเสียดทานสูง หรือการรักษาตำแหน่งที่แม่นยำภายใต้แรงกดดันภายนอกคงที่ สิ่งสำคัญคือต้องแยกแยะว่าก สเต็ปเปอร์มอเตอร์แรงบิดสูง ไม่จำเป็นต้องเป็นมอเตอร์ประเภทอื่น แต่เป็นการกำหนดสเต็ปเปอร์มอเตอร์ที่ได้รับการออกแบบมาเพื่อให้ค่าแรงบิดสูงกว่าเส้นฐานมาตรฐานสำหรับขนาดเฟรมอย่างมีนัยสำคัญ
โดยทั่วไปแรงบิดในสเต็ปเปอร์มอเตอร์จะวัดเป็นนิวตัน-เมตร (N·m) หรือออนซ์-นิ้ว (ออนซ์-นิ้ว) ข้อกำหนดแรงบิดที่สำคัญที่สุดที่พบในเอกสารข้อมูลของมอเตอร์คือ ถือแรงบิด - นี่คือแรงบิดสูงสุดที่มอเตอร์สามารถผลิตได้เมื่อหยุดนิ่งเมื่อคอยล์ได้รับพลังงานเต็มที่ ทำหน้าที่เป็นตัวบ่งชี้หลักเกี่ยวกับความแรงของมอเตอร์ การแสดงที่สำคัญอีกอย่างหนึ่งก็คือ เส้นโค้งแรงบิด กราฟที่แสดงแรงบิดที่มีอยู่ของมอเตอร์เทียบกับความเร็วในการหมุน เส้นโค้งนี้มีความสำคัญเนื่องจากแรงบิดของสเต็ปเปอร์มอเตอร์ลดลงเมื่อความเร็วเพิ่มขึ้นเนื่องจากผลกระทบของการเหนี่ยวนำและ EMF ด้านหลัง ทำความเข้าใจกับ ความเร็วของสเต็ปเปอร์มอเตอร์เทียบกับแรงบิด ความสัมพันธ์เป็นสิ่งสำคัญในการเลือกมอเตอร์ที่จะทำงานได้อย่างเพียงพอตลอดช่วงการทำงานที่ต้องการทั้งหมด เพื่อให้แน่ใจว่ามอเตอร์จะไม่หยุดทำงานที่ความเร็วสูงกว่า
แรงบิดเอาท์พุตของสเต็ปเปอร์มอเตอร์ไม่ใช่ค่าคงที่ ได้รับอิทธิพลจากปัจจัยด้านการปฏิบัติงานและการออกแบบหลายประการ กระแสไฟที่จ่ายให้กับขดลวดมอเตอร์เป็นตัวขับหลัก โดยทั่วไปกระแสไฟฟ้าที่สูงขึ้นจะส่งผลให้สนามแม่เหล็กแรงขึ้น และส่งผลให้แรงบิดสูงขึ้น ขึ้นอยู่กับขีดจำกัดการออกแบบของมอเตอร์ แรงดันไฟฟ้ายังมีบทบาทสำคัญเช่นกัน โดยเฉพาะอย่างยิ่งที่ความเร็วที่สูงขึ้น แรงดันไฟฟ้าที่สูงขึ้นช่วยให้กระแสเปลี่ยนทิศทางในขดลวดมอเตอร์ได้เร็วขึ้น ช่วยรักษาแรงบิดที่ความเร็วการหมุนที่เพิ่มขึ้น การออกแบบทางกายภาพของมอเตอร์ รวมถึงคุณภาพของวัสดุแม่เหล็ก จำนวนฟันสเตเตอร์ และช่องว่างอากาศระหว่างโรเตอร์และสเตเตอร์ ล้วนได้รับการออกแบบทางวิศวกรรมเพื่อเพิ่มการสร้างแรงบิดสูงสุด ตัวอย่างเช่น ก สเต็ปเปอร์มอเตอร์แรงบิดสูง เนม่า 23 จะได้รับการออกแบบด้วยปัจจัยเหล่านี้ซึ่งได้รับการปรับให้เหมาะสมเพื่อให้แรงบิดมากกว่ามอเตอร์ NEMA 23 มาตรฐาน
ข้อได้เปรียบหลักของการใช้ก สเต็ปเปอร์มอเตอร์แรงบิดสูง คือการเพิ่มขึ้นอย่างมากของกำลังทางกลสำหรับงานควบคุมการเคลื่อนไหว ความสามารถที่เพิ่มขึ้นนี้แปลไปสู่คุณประโยชน์หลักหลายประการที่สำคัญต่อความสำเร็จของการใช้งานที่มีความต้องการสูง ประโยชน์ที่เห็นได้ชัดเจนที่สุดคือความสามารถในการรับแรงเฉื่อยที่มากขึ้นและเอาชนะแรงเสียดทานที่มีมาก ในระบบ เช่น เราเตอร์ CNC หรือสายพานลำเลียงอัตโนมัติ มอเตอร์ไม่เพียงต้องขยับหัวเครื่องมือหรือสายพานเท่านั้น แต่ยังต้องเร่งความเร็วและลดความเร็วของมวลด้วย มอเตอร์ที่มีแรงบิดไม่เพียงพอจะหยุดหรือสูญเสียขั้นตอนภายใต้ความต้องการดังกล่าว ในขณะที่ a สเต็ปเปอร์มอเตอร์แรงบิดสูง ให้กำลังที่จำเป็นเพื่อให้แน่ใจว่าการทำงานเชื่อถือได้ จึงขยายขอบเขตการใช้งานที่เป็นไปได้และปรับปรุงความทนทานของการใช้งานที่มีอยู่
ปรับปรุงความแม่นยำและลดข้อผิดพลาดด้านตำแหน่งลงอย่างมาก ถือเป็นข้อได้เปรียบที่สำคัญอีกประการหนึ่ง สูง ถือแรงบิด ลักษณะของมอเตอร์เหล่านี้ช่วยให้สามารถรักษาตำแหน่งได้อย่างมั่นคงต่อแรงภายนอกหรือการสั่นสะเทือนที่ไม่คาดคิด นี่เป็นสิ่งสำคัญในการใช้งาน เช่น การประกอบที่แม่นยำหรือการวางตำแหน่งอุปกรณ์ทางการแพทย์ ซึ่งการเบี่ยงเบนแม้เพียงเล็กน้อยก็สามารถนำไปสู่ความล้มเหลวได้ นอกจากนี้ แรงบิดสำรองจำนวนมากยังช่วยป้องกันการหยุดนิ่ง ซึ่งเป็นสาเหตุทั่วไปของการสูญเสียขั้นบันได ขั้นตอนที่หายไปเกิดขึ้นเมื่อมอเตอร์ล้มเหลวในการดำเนินการตามคำสั่ง ทำให้เกิดข้อผิดพลาดเกี่ยวกับตำแหน่งสะสมซึ่งระบบวงรอบเปิดไม่สามารถตรวจพบได้ โดยทำงานได้ดีภายในกำลังแรงบิดของมัน ก สเต็ปเปอร์มอเตอร์แรงบิดสูง ช่วยลดความเสี่ยงนี้ได้อย่างมาก ทำให้มั่นใจได้ว่าตำแหน่งที่แท้จริงของเครื่องจักรจะตรงกับตำแหน่งที่ต้องการซึ่งผู้ควบคุมสั่งไว้เสมอ
สุดท้ายนี้ มอเตอร์เหล่านี้ให้ความยืดหยุ่นในการออกแบบและอายุการใช้งานที่ยาวนานยิ่งขึ้น วิศวกรไม่ได้ถูกบังคับให้ดันมอเตอร์จนถึงขีดจำกัดการทำงาน ซึ่งมักจะทำให้เกิดความร้อนสูงเกินไปและอายุการใช้งานลดลง แต่พวกเขาสามารถเลือกก สเต็ปเปอร์มอเตอร์แรงบิดสูง ที่ทำงานได้อย่างมีประสิทธิภาพและเย็นสบายภายในขอบเขตประสิทธิภาพ ช่องว่างนี้ยังช่วยให้ระบบสามารถจัดการกับโหลดที่แปรผันหรือสิ่งกีดขวางที่ไม่คาดคิดได้อย่างสวยงามยิ่งขึ้นโดยไม่เกิดความล้มเหลวร้ายแรง ความสามารถในการใช้โครงมอเตอร์ที่มีขนาดกะทัดรัดมากขึ้น เช่น ก สเต็ปเปอร์มอเตอร์แรงบิดสูง เนม่า 23 เพื่อให้ได้ประสิทธิภาพที่อาจต้องใช้เฟรมที่ใหญ่ขึ้นและยุ่งยากมากขึ้น ถือเป็นข้อดีโดยตรงของเทคโนโลยีนี้ ซึ่งช่วยให้สามารถออกแบบกลไกได้อย่างคล่องตัวและมีประสิทธิภาพมากขึ้น
การผสมผสานที่เป็นเอกลักษณ์ของความแม่นยำ ความน่าเชื่อถือ และพลังทำให้ สเต็ปเปอร์มอเตอร์แรงบิดสูงs เหมาะสำหรับการใช้งานที่หลากหลายในอุตสาหกรรมต่างๆ ความสามารถในการควบคุมการเคลื่อนไหวในขั้นตอนแยกกันโดยไม่มีเซ็นเซอร์ป้อนกลับทำให้การออกแบบระบบง่ายขึ้นในขณะที่รับประกันความแม่นยำ
ในด้านของ วิทยาการหุ่นยนต์ มอเตอร์เหล่านี้เป็นตัวเลือกแอคชูเอเตอร์สำหรับการเคลื่อนไหวข้อต่อ โดยเฉพาะใน แขนหุ่นยนต์ ที่ต้องรับน้ำหนักบรรทุกหนัก ที่ สเต็ปเปอร์มอเตอร์แรงบิดสูง for robotics ให้แรงที่จำเป็นในการประกบแขนขาและที่จับได้อย่างแม่นยำ ขณะเดียวกันก็รองรับน้ำหนักของแขนและวัตถุที่แขนถืออยู่ นี่เป็นสิ่งจำเป็นสำหรับงานต่างๆ ตั้งแต่การประกอบและการเชื่อมทางอุตสาหกรรม ไปจนถึงระบบอัตโนมัติในห้องปฏิบัติการที่ซับซ้อน ที่ ถือแรงบิด ช่วยให้มั่นใจว่าแขนสามารถรักษาตำแหน่งไว้ได้โดยไม่เคลื่อน แม้ว่าจะเปิดเครื่องแต่ไม่ได้เคลื่อนไหวก็ตาม
เครื่องจักรซีเอ็นซี เป็นตัวแทนของแอปพลิเคชันคลาสสิกที่ความแม่นยำและพลังไม่สามารถต่อรองได้ ก สเต็ปเปอร์มอเตอร์สำหรับเราเตอร์ CNC การใช้งานจะต้องเคลื่อนย้ายเครื่องมือตัดผ่านวัสดุ เช่น โลหะ ไม้ หรือพลาสติก ซึ่งต้องเผชิญกับความต้านทานอย่างมาก ที่ สเต็ปเปอร์มอเตอร์แรงบิดสูง ช่วยให้มั่นใจว่ามีการติดตามเส้นทางเครื่องมืออย่างถูกต้องโดยไม่ทำให้หยุดชะงัก ซึ่งจะทำให้ชิ้นงานเสียหายและอาจสร้างความเสียหายให้กับเครื่องจักรได้ หลักการเดียวกันนี้ใช้กับอุปกรณ์ CNC อื่นๆ เช่น เครื่องกลึง เครื่องตัดพลาสม่า และเครื่องตัดเลเซอร์ ซึ่งประสิทธิภาพที่สม่ำเสมอเป็นสิ่งสำคัญต่อคุณภาพและความสามารถในการผลิต
โลกของ การพิมพ์ 3 มิติ อาศัยสเต็ปเปอร์มอเตอร์อย่างมากสำหรับทั้งการเคลื่อนที่ของแกนและการอัดขึ้นรูปเส้นใย เนื่องจากเครื่องพิมพ์มีขนาดและความเร็วเพิ่มขึ้น และเนื่องจากวัสดุอย่าง ABS และไนลอนต้องใช้แรงมากขึ้นในการดันผ่านเครื่องอัดรีด ความต้องการแรงบิดก็เพิ่มขึ้น ก สเต็ปเปอร์มอเตอร์สำหรับเครื่องพิมพ์ 3D แรงบิดสูง รับประกันการจัดตำแหน่งชั้นที่แม่นยำโดยป้องกันขั้นตอนที่พลาดบนแกน X, Y และ Z ในขณะที่มอเตอร์เครื่องอัดรีดแรงบิดสูงให้การไหลของเส้นใยสม่ำเสมอ นำไปสู่คุณภาพการพิมพ์และความน่าเชื่อถือที่สูงขึ้น
ระบบอัตโนมัติทางอุตสาหกรรม เป็นขอบเขตกว้างๆ ที่มอเตอร์เหล่านี้มีอยู่ทั่วไปทุกหนทุกแห่ง พวกเขาขับเคลื่อนระบบสายพานลำเลียงเข้ามา เครื่องจักรบรรจุภัณฑ์ , กระตุ้นวาล์ว และวางส่วนประกอบต่างๆ เข้าไป เลือกและวางเครื่อง - ในสภาพแวดล้อมเหล่านี้ ความทนทานและการทำงานต่อเนื่องเป็นสิ่งสำคัญยิ่ง การใช้อัน มอเตอร์สเต็ปเปอร์แรงบิดสูงอุตสาหกรรม รับประกันความน่าเชื่อถือในระยะยาวและความสามารถในการทำงานซ้ำๆ ด้วยความแม่นยำสูงนับล้านครั้ง สำหรับสภาพแวดล้อมที่รุนแรง ตัวเลือกเช่น สเต็ปเปอร์มอเตอร์แรงบิดสูง IP65 หรือแม้กระทั่ง สเต็ปเปอร์มอเตอร์กลางแจ้งที่ได้รับการจัดอันดับ IP67 มีคุณสมบัติต้านทานฝุ่นและความชื้น
อุปกรณ์การแพทย์ ต้องการความแม่นยำ ความสะอาด และความน่าเชื่อถือในระดับสูงสุด สเต็ปเปอร์มอเตอร์แรงบิดสูง ใช้ในอุปกรณ์ต่างๆ เช่น เครื่องวิเคราะห์อัตโนมัติ ปั๊มแช่ หุ่นยนต์ผ่าตัด และอุปกรณ์สร้างภาพ การเคลื่อนไหวที่แม่นยำจะควบคุมการจัดการตัวอย่าง การจัดส่งขนาดยา และตำแหน่งของเซ็นเซอร์และเครื่องมือ ในหลายกรณี ก สเต็ปเปอร์มอเตอร์เสียงรบกวนต่ำสำหรับระบบอัตโนมัติในห้องปฏิบัติการ หรือใช้ทางการแพทย์เพื่อให้แน่ใจว่ามีสภาพแวดล้อมการทำงานที่เงียบสงบ ลักษณะการทำงานของสเต็ปเปอร์มอเตอร์ที่คาดเดาได้เมื่อรวมกับแรงบิดสูง ทำให้เหมาะสำหรับการใช้งานที่มีความละเอียดอ่อนเหล่านี้
นอกเหนือจากนี้ แอปพลิเคชันพิเศษยังเกิดขึ้นอย่างต่อเนื่อง พวกมันถูกใช้ใน แอคชูเอเตอร์ยานยนต์ สำหรับการปรับกระจกและการควบคุมคันเร่ง เครื่องพิมพ์ เพื่อการป้อนกระดาษที่แม่นยำ และระบบพลังงานหมุนเวียน เช่น มอเตอร์ติดตามแสงอาทิตย์สเต็ปเปอร์มอเตอร์แรงบิดสูง หน่วยที่ปรับแผงให้ตามดวงอาทิตย์และเข้า การควบคุมระดับเสียงของกังหันลม กลไก
การเลือกที่เหมาะสม สเต็ปเปอร์มอเตอร์แรงบิดสูง สำหรับการใช้งานเฉพาะต้องมีการประเมินพารามิเตอร์ที่สำคัญหลายตัวอย่างเป็นระบบ การเลือกที่ไม่ถูกต้องอาจทำให้ประสิทธิภาพการทำงานไม่ดี มอเตอร์หยุดทำงาน ความร้อนสูงเกินไป หรือความล้มเหลวก่อนเวลาอันควร
ขั้นตอนที่สำคัญที่สุดคือการกำหนดความต้องการแรงบิดในการใช้งานอย่างแม่นยำ ซึ่งเกี่ยวข้องกับการคำนวณแรงบิดที่จำเป็นในการเร่งความเร็วความเฉื่อยของโหลด และเพื่อเอาชนะแรงต่อเนื่องใดๆ เช่น แรงเสียดทานหรือแรงโน้มถ่วง มอเตอร์จะต้องให้แรงบิดที่เกินแรงบิดสูงสุดที่ต้องการโดยการใช้งานตลอดช่วงความเร็วการทำงานทั้งหมด ตามที่กำหนดโดย ความเร็วของสเต็ปเปอร์มอเตอร์เทียบกับแรงบิด เส้นโค้ง แนวปฏิบัติที่ดีที่สุดคือรวมระยะขอบด้านความปลอดภัยไว้ที่ 30-50% สูงกว่าข้อกำหนดที่คำนวณไว้ เพื่อพิจารณาตัวแปรที่ไม่คาดคิด เช่น การเปลี่ยนแปลงของแรงเสียดทานหรือความทนทานต่อการผลิต การให้คำปรึกษา แผนภูมิแรงบิดของสเต็ปเปอร์มอเตอร์ สำหรับมอเตอร์ผู้สมัครถือเป็นสิ่งสำคัญในการตรวจสอบว่าเส้นโค้งแรงบิดนั้นตรงตามความต้องการของการใช้งานทั้งที่ความเร็วต่ำและสูง
ขนาดทางกายภาพของมอเตอร์มักเป็นมาตรฐานโดย NEMA ขนาดเฟรม (เช่น NEMA 17, NEMA 23, NEMA 34) เป็นข้อบ่งชี้ทั่วไปเกี่ยวกับความสามารถด้านพลังงาน ก สเต็ปเปอร์มอเตอร์แรงบิดสูง เนม่า 23 โดยทั่วไปจะให้แรงบิดมากกว่ามอเตอร์ NEMA 17 ในขณะที่ สเต็ปเปอร์มอเตอร์เฟรมขนาดใหญ่ เช่นเดียวกับ NEMA 34 จะสามารถให้แรงบิดที่สูงกว่าได้ อย่างไรก็ตาม ขนาดเฟรมเพียงอย่างเดียวไม่ใช่ตัวบ่งชี้ที่สมบูรณ์แบบ การออกแบบภายในและคุณภาพของวัสดุมีอิทธิพลอย่างมากต่อแรงบิดที่แท้จริง การเลือกจะต้องปรับสมดุลความต้องการแรงบิดกับพื้นที่ว่างและข้อจำกัดในการติดตั้งภายในเครื่องจักร
การจับคู่ข้อกำหนดทางไฟฟ้าของมอเตอร์กับไดรเวอร์และแหล่งจ่ายไฟเป็นสิ่งสำคัญสำหรับการบรรลุประสิทธิภาพที่กำหนด มอเตอร์ คะแนนปัจจุบัน คือกระแสสูงสุดต่อเฟสที่สามารถจัดการได้โดยไม่เกิดความร้อนสูงเกินไป ผู้ขับขี่จะต้องสามารถส่งกระแสไฟฟ้านี้ได้ อุปทาน แรงดันไฟฟ้า ก็มีความสำคัญไม่แพ้กัน แรงดันไฟฟ้าที่สูงขึ้นจะทำให้กระแสเพิ่มขึ้นอย่างรวดเร็วในขดลวดมอเตอร์ ซึ่งจำเป็นต่อการรักษาแรงบิดที่ความเร็วสูงขึ้น การใช้งานมอเตอร์ด้วยแหล่งจ่ายไฟที่มีแรงดันไฟฟ้าต่ำเกินไปจะส่งผลให้แรงบิดลดลงอย่างรวดเร็วเมื่อความเร็วเพิ่มขึ้น ซึ่งเป็นปรากฏการณ์ที่มองเห็นได้ชัดเจนบนกราฟแรงบิดของมอเตอร์
ที่ มุมก้าว กำหนดความละเอียดที่แท้จริงของมอเตอร์ มอเตอร์มาตรฐาน 1.8° ให้ 200 สเต็ปต่อรอบ ในขณะที่มอเตอร์ 0.9° ให้ 400 สเต็ป สำหรับการใช้งานที่ต้องการการควบคุมตำแหน่งที่ละเอียดมาก มุมขั้นบันไดที่เล็กลง หรือใช้ไดรเวอร์ที่มีความสามารถ ไมโครสเต็ปปิ้ง เป็นประโยชน์ สิ่งสำคัญคือต้องจำไว้ว่าแม้ว่าไมโครสเต็ปปิ้งจะเพิ่มความละเอียด แต่ก็ไม่ได้เพิ่มความแม่นยำอย่างมีนัยสำคัญ แรงบิดที่เกิดขึ้นที่ตำแหน่งไมโครสเต็ปจะต่ำกว่าที่ตำแหน่งเต็มสเต็ป
ที่ operating environment must be considered to ensure reliability. Factors such as ambient temperature, presence of contaminants like dust or moisture, and exposure to vibrations can impact motor selection. For example, in a wash-down environment or an outdoor application, an สเต็ปเปอร์มอเตอร์แรงบิดสูง IP65 หรือสูงกว่านั้นก็จำเป็นเพื่อป้องกันความเสียหาย อุณหภูมิแวดล้อมที่สูงอาจต้องมีการลดพิกัดมอเตอร์ (โดยใช้แรงบิดต่ำกว่าข้อกำหนดแรงบิดสูงสุด) เพื่อป้องกันความร้อนสูงเกินไป หรือการเลือกมอเตอร์ที่มีระดับอุณหภูมิสูงกว่า
การเลือกรุ่นเฉพาะจากที่มีอยู่มากมาย สเต็ปเปอร์มอเตอร์แรงบิดสูงs อาจเป็นเรื่องที่น่ากลัว ภาพรวมต่อไปนี้นำเสนอผลิตภัณฑ์ต่างๆ ที่จัดหมวดหมู่ตามจุดแข็งในการใช้งานทั่วไป โดยเน้นคุณลักษณะหลักโดยไม่ต้องอ้างอิงถึงชื่อแบรนด์เฉพาะ รายการนี้แสดงให้เห็นถึงความหลากหลายสำหรับวิศวกรและนักออกแบบ
NEMA 17 Stepper Motor แรงบิดสูง: มอเตอร์ขนาดกะทัดรัดนี้เป็นอุปกรณ์สำคัญในการใช้งานที่มีพื้นที่จำกัดแต่ประสิทธิภาพไม่ลดลง เป็นที่นิยมอย่างมากในระดับไฮเอนด์ การพิมพ์ 3 มิติ และระบบอัตโนมัติขนาดเล็ก รุ่นสมัยใหม่มีค่าแรงบิดที่ทัดเทียมกับรุ่นเก่าที่ใหญ่กว่า ทำให้เหมาะสำหรับเครื่องมือที่มีความแม่นยำและมีขนาดกะทัดรัด วิทยาการหุ่นยนต์ ข้อต่อ
NEMA 23 Stepper Motor แรงบิดสูง: ขนาดเฟรมที่พบบ่อยที่สุดสำหรับการใช้งานแบบตั้งโต๊ะที่มีความต้องการสูง สเต็ปเปอร์มอเตอร์แรงบิดสูง เนม่า 23 ให้ความสมดุลที่ยอดเยี่ยมระหว่างขนาด กำลัง และราคา เป็นทางเลือกสำหรับ เราเตอร์ซีเอ็นซี , เครื่องกัดขนาดเล็ก และใหญ่กว่า เครื่องพิมพ์ 3 มิติ - ความเก่งกาจทำให้เหมาะสำหรับหลากหลาย ระบบอัตโนมัติทางอุตสาหกรรม งาน
NEMA 34 Stepper Motor แรงบิดสูง: เมื่อต้องใช้พลังงานมหาศาลสิ่งนี้ สเต็ปเปอร์มอเตอร์เฟรมขนาดใหญ่ คือก้าวต่อไป It is designed for heavy-duty CNC เครื่องจักร โครงสำหรับตั้งสิ่งของทางอุตสาหกรรม และระบบอัตโนมัติที่ต้องเคลื่อนย้ายสิ่งของจำนวนมาก มอเตอร์เหล่านี้จำเป็นสำหรับการใช้งานที่ต้องการแรงขับสูง เช่น ในรูปแบบขนาดใหญ่ เครื่องจักรการพิมพ์ .
สเต็ปเปอร์มอเตอร์เกียร์: ประเภทนี้รวมกระปุกเกียร์ดาวเคราะห์เข้ากับมาตรฐาน สเต็ปเปอร์มอเตอร์ไฮบริด - การลดเกียร์จะช่วยเพิ่มแรงบิดเอาท์พุตอย่างมีนัยสำคัญในขณะที่ลดความเร็วเอาท์พุตลง ทำให้เกิดความโดดเด่นเป็นพิเศษ มอเตอร์แรงบิดสูงรอบต่ำ - เหมาะอย่างยิ่งสำหรับการใช้งาน เช่น ระบบขับเคลื่อนสายพานลำเลียง แอคชูเอเตอร์วาล์ว และระบบใดๆ ที่ต้องการแรงสูงที่ความเร็วต่ำและควบคุมได้
สเต็ปเปอร์มอเตอร์กันน้ำ (IP65/IP67): ออกแบบมาสำหรับสภาพแวดล้อมที่รุนแรง สเต็ปเปอร์มอเตอร์แรงบิดสูง IP65 กันฝุ่นและป้องกันการฉีดน้ำ ทำให้เหมาะสำหรับการแปรรูปอาหารและเครื่องดื่ม เครื่องจักรบรรจุภัณฑ์ และการใช้งานกลางแจ้ง อ สเต็ปเปอร์มอเตอร์กลางแจ้งที่ได้รับการจัดอันดับ IP67 ให้การป้องกันที่ดียิ่งขึ้นต่อการแช่ตัวชั่วคราว เหมาะสำหรับ เครื่องติดตามแสงอาทิตย์ ระบบหรืออุปกรณ์ทางการเกษตร
มอเตอร์สเต็ปเปอร์แรงบิดสูงแบบวงปิด: ระบบขั้นสูงนี้รวมก สเต็ปเปอร์มอเตอร์แรงบิดสูง ด้วยตัวเข้ารหัสแบบรวม ตัวเข้ารหัสจะให้ผลตอบรับแบบเรียลไทม์แก่ไดรเวอร์เฉพาะทาง โดยสร้าง วงปิด ระบบที่สามารถตรวจจับและแก้ไขขั้นตอนที่พลาดได้ เทคโนโลยีนี้นำเสนอความเรียบง่ายของสเต็ปเปอร์มอเตอร์พร้อมความน่าเชื่อถือและประสิทธิภาพความเร็วสูงของเซอร์โว เหมาะสำหรับภารกิจที่มีความสำคัญอย่างยิ่ง อุปกรณ์ทางการแพทย์ และปริมาณงานสูง เลือกและวางเครื่อง .
สเต็ปเปอร์มอเตอร์แรงบิดสูงพร้อมตัวเข้ารหัสและหัวเกียร์ในตัว: สิ่งนี้แสดงถึงโซลูชันที่ได้รับการออกแบบทางวิศวกรรมขั้นสูงที่รวมมอเตอร์ หัวเกียร์สำหรับการเพิ่มแรงบิด และตัวเข้ารหัสสำหรับการตอบสนองตำแหน่งไว้ในยูนิตเดียว นี้ มอเตอร์พร้อมตัวเข้ารหัสและหัวเกียร์ในตัว ทำให้การออกแบบและติดตั้งง่ายขึ้นสำหรับงานการเคลื่อนไหวที่ซับซ้อน ให้แรงบิดสูง ความเร็วต่ำ และรับประกันการควบคุมในแพ็คเกจขนาดกะทัดรัดสำหรับการใช้งานเช่น แขนหุ่นยนต์ และ แอคชูเอเตอร์ยานยนต์ .
สเต็ปเปอร์มอเตอร์ที่มีความแม่นยำสูงพิเศษ: ที่se motors are engineered for applications requiring the utmost accuracy and smoothness, such as in อุปกรณ์ทางการแพทย์ การผลิตหรือระบบอัตโนมัติในห้องปฏิบัติการ โดยมักจะมีมุมขั้นที่ละเอียดมาก และได้รับการปรับให้เหมาะสมเพื่อให้มีการสั่นสะเทือนและเสียงรบกวนน้อยที่สุด โดยมีคุณสมบัติเป็น a สเต็ปเปอร์มอเตอร์เสียงรบกวนต่ำสำหรับระบบอัตโนมัติในห้องปฏิบัติการ .
สเต็ปเปอร์มอเตอร์ที่ผ่านการรับรองสำหรับอุตสาหกรรมที่มีการควบคุม: มอเตอร์ที่ใช้ในอุปกรณ์ทางการแพทย์ การบินและอวกาศ หรือที่หันหน้าไปทางสาธารณะ มักต้องมีใบรับรองอย่างเป็นทางการ ก สเต็ปเปอร์มอเตอร์ที่มีใบรับรอง CE / UL / RoHS แสดงให้เห็นถึงการปฏิบัติตามมาตรฐานความปลอดภัย สิ่งแวดล้อม และความเข้ากันได้ทางแม่เหล็กไฟฟ้าระดับสากล ซึ่งเป็นข้อกำหนดเบื้องต้นสำหรับหลาย ๆ คน อุปกรณ์ทางการแพทย์ และ consumer-facing applications.
มอเตอร์สเต็ปเปอร์ไฮบริดแรงบิดสูงแบบกำหนดเอง: สำหรับการใช้งานที่มีข้อจำกัดทางกล ไฟฟ้า หรือสิ่งแวดล้อมโดยเฉพาะ มอเตอร์สเต็ปเปอร์ไฮบริดแรงบิดสูงแบบกำหนดเอง อาจเป็นทางออกเดียว ซัพพลายเออร์สามารถปรับเปลี่ยนการออกแบบมาตรฐานด้วยความพิเศษได้ ขนาดเพลา ขั้วต่อ ขดลวด สารเคลือบ หรือวัสดุแม่เหล็กเพื่อให้ตรงตามข้อกำหนดด้านประสิทธิภาพและฟอร์มแฟคเตอร์
บรรลุผลการปฏิบัติงานที่ได้รับการจัดอันดับจากก สเต็ปเปอร์มอเตอร์แรงบิดสูง ขึ้นอยู่กับการจับคู่อุปกรณ์อิเล็กทรอนิกส์ไดรฟ์ที่ถูกต้องโดยสิ้นเชิง ตัวมอเตอร์เองเป็นอุปกรณ์แบบพาสซีฟ ไดรเวอร์และแหล่งจ่ายไฟจะกำหนดว่าจะแปลงพลังงานไฟฟ้าเป็นการเคลื่อนที่ทางกลได้อย่างมีประสิทธิภาพเพียงใด
ไดรเวอร์สเต็ปเปอร์มอเตอร์ เป็นจุดเชื่อมต่อวิกฤตระหว่างสัญญาณควบคุมและมอเตอร์ โดยรับพัลส์ขั้นตอนและทิศทางพลังงานต่ำจากตัวควบคุมการเคลื่อนไหว และแปลเป็นกระแสไฟกำลังสูงที่จำเป็นในการขับเคลื่อนขดลวดมอเตอร์ สำหรับ สเต็ปเปอร์มอเตอร์แรงบิดสูงs การเลือกใช้เทคโนโลยีไดรเวอร์เป็นสิ่งสำคัญยิ่ง ไดรเวอร์พื้นฐานทำงานในโหมดเต็มขั้นหรือครึ่งขั้น ซึ่งอาจเพียงพอสำหรับการใช้งานบางประเภท แต่มักจะทำให้เกิดการสั่นสะเทือนที่เห็นได้ชัดเจน ไดรเวอร์ไมโครสเต็ปปิ้ง ขอแนะนำอย่างยิ่ง โดยแบ่งแต่ละขั้นตอนแบบอิเล็กทรอนิกส์ออกเป็นไมโครสเต็ปเล็กๆ ส่งผลให้การเคลื่อนไหวราบรื่นขึ้นอย่างเห็นได้ชัด ลดเสียงรบกวน และเสถียรภาพที่ความเร็วต่ำดีขึ้น ความสามารถของผู้ขับขี่ในการส่งกระแสไฟฟ้าที่สม่ำเสมอถือเป็นสิ่งสำคัญในการรักษาแรงบิด โดยเฉพาะอย่างยิ่งที่ความเร็วที่สูงขึ้น
พาวเวอร์ซัพพลาย ต้องเลือกอย่างระมัดระวัง แรงดันไฟฟ้าของแหล่งจ่ายไฟควรสูงกว่าแรงดันไฟฟ้าที่กำหนดของมอเตอร์อย่างมาก เพื่อเอาชนะ EMF ด้านหลังที่สร้างขึ้นที่ความเร็ว หลักการทั่วไปคือการใช้แรงดันไฟฟ้า 5 ถึง 20 เท่าของแรงดันไฟฟ้าที่กำหนดของมอเตอร์ ตราบใดที่ไม่เกินพิกัดแรงดันไฟฟ้าสูงสุดของผู้ขับขี่ แหล่งจ่ายไฟจะต้องสามารถจ่ายกระแสไฟที่มอเตอร์ต้องการได้ อัตรากระแสไฟ (เป็นแอมป์) ของแหล่งจ่ายควรมีอย่างน้อยเท่ากับผลรวมของกระแสที่ต้องการโดยมอเตอร์ทุกตัวที่ขับเคลื่อน แม้ว่าจะแนะนำให้ใช้ระยะขอบสำหรับความต้องการสูงสุดก็ตาม
สัญญาณควบคุม คือคำสั่งดิจิทัลที่ควบคุมการเคลื่อนไหว ไดรเวอร์สเต็ปเปอร์สมัยใหม่ส่วนใหญ่ใช้อินเทอร์เฟซแบบสองสัญญาณที่เรียบง่าย: STEP และ DIRECTION แต่ละพัลส์บนบรรทัด STEP จะสั่งให้มอเตอร์เคลื่อนที่เพิ่มขึ้นทีละขั้น (หนึ่งสเต็ปหรือไมโครสเต็ป) ความถี่ของพัลส์เหล่านี้จะกำหนดความเร็วของมอเตอร์ ระดับ (สูงหรือต่ำ) บนเส้น DIRECTION จะกำหนดทิศทางการหมุน ความเรียบง่ายนี้ทำให้การควบคุม สเต็ปเปอร์มอเตอร์แรงบิดสูง ตรงไปตรงมาสำหรับไมโครคอนโทรลเลอร์และ PLC
สายไฟและการเชื่อมต่อ จะต้องดำเนินการอย่างเหมาะสมเพื่อให้มั่นใจในความน่าเชื่อถือและป้องกันความเสียหาย การใช้สายไฟที่มีเกจวัดเพียงพอถือเป็นสิ่งสำคัญในการจัดการกระแสของมอเตอร์โดยไม่มีแรงดันไฟฟ้าตกหรือความร้อนมากเกินไป การเชื่อมต่อกับไดรเวอร์ควรมีความปลอดภัย และแนวทางปฏิบัติที่ดีคือใช้สายเคเบิลที่มีฉนวนหุ้มสำหรับสัญญาณ STEP และ DIRECTION เพื่อป้องกันสัญญาณรบกวนทางไฟฟ้า ซึ่งอาจทำให้มอเตอร์ทำงานผิดปกติได้ การต่อสายดินที่เหมาะสมของไดรเวอร์ แหล่งจ่ายไฟ และโครงมอเตอร์ก็มีความสำคัญอย่างยิ่งต่อการทำงานที่มั่นคงเช่นกัน
แม้จะผ่านการคัดสรรมาอย่างดีแล้วก็ตาม สเต็ปเปอร์มอเตอร์แรงบิดสูง และระบบขับเคลื่อนอาจเกิดปัญหาระหว่างการทำงานได้ การทำความเข้าใจสาเหตุที่แท้จริงของปัญหาทั่วไปถือเป็นสิ่งสำคัญสำหรับการรักษาความน่าเชื่อถือและประสิทธิภาพของระบบ
การหยุดมอเตอร์ เป็นหนึ่งในปัญหาที่พบบ่อยที่สุด มันเกิดขึ้นเมื่อแรงบิดที่ต้องการโดยโหลดเกินแรงบิดที่มอเตอร์สามารถผลิตได้ที่ความเร็วที่กำหนด สาเหตุหลักคือการจับคู่ที่ไม่ถูกต้องระหว่างความสามารถของมอเตอร์และความต้องการของการใช้งาน ซึ่งมักถูกเปิดเผยโดย ความเร็วของสเต็ปเปอร์มอเตอร์เทียบกับแรงบิด เส้นโค้ง การหยุดทำงานอาจเกิดจากการจ่ายไฟไม่เพียงพอ แหล่งจ่ายไฟที่มีขนาดต่ำกว่าปกติซึ่งไม่สามารถให้แรงดันไฟฟ้าที่เพียงพอจะทำให้แรงบิดลดลงอย่างรวดเร็วเมื่อความเร็วเพิ่มขึ้น ในทำนองเดียวกัน ตัวขับที่ตั้งไว้ที่ขีดจำกัดกระแสต่ำกว่าพิกัดของมอเตอร์จะป้องกันไม่ให้มอเตอร์สร้างแรงบิดเต็มที่ โซลูชันประกอบด้วยการคำนวณความต้องการแรงบิดใหม่โดยให้มีความปลอดภัยมากขึ้น การเลือกมอเตอร์ที่มีกราฟแรงบิดสูงกว่า การเพิ่มแรงดันไฟฟ้าภายในขีดจำกัดของผู้ขับขี่ หรือการกำหนดค่าเอาต์พุตกระแสของผู้ขับขี่อย่างถูกต้อง
ความร้อนสูงเกินไป เป็นคุณลักษณะตามธรรมชาติของสเต็ปเปอร์มอเตอร์ เนื่องจากพวกมันดึงกระแสได้แม้ในขณะที่อยู่กับที่ อย่างไรก็ตาม ความร้อนที่มากเกินไปอาจทำให้ฉนวนเสื่อมสภาพและทำให้ฉนวนสั้นลงได้ วงจรชีวิตของสเต็ปเปอร์มอเตอร์ - สาเหตุที่พบบ่อยที่สุดคือการทำงานของมอเตอร์ที่หรือใกล้กับพิกัดกระแสสูงสุดเป็นเวลานาน การใช้กระแสไฟฟ้ามากเกินไปเพื่อให้ได้แรงบิดมากกว่าที่มอเตอร์ได้รับการออกแบบมาจะทำให้เกิดความร้อน สาเหตุอื่นๆ ได้แก่ อัตราก้าวที่สูงที่ความเร็วต่ำซึ่งมีการผลิตแรงบิดสูง หรือการระบายความร้อนไม่เพียงพอในสภาพแวดล้อมการใช้งาน เพื่อบรรเทาความร้อนสูงเกิน ตรวจสอบให้แน่ใจว่ากระแสไฟของคนขับได้รับการตั้งค่าอย่างเหมาะสม—ซึ่งมักจะเป็นกระแสไฟพิกัดของมอเตอร์—และไม่สูงโดยไม่จำเป็น การปรับปรุงการไหลเวียนของอากาศรอบๆ มอเตอร์หรือการเพิ่มแผงระบายความร้อนอาจมีประสิทธิภาพ สำหรับการใช้งานต่อเนื่องที่ต้องใช้แรงบิดสูง การเลือกมอเตอร์ที่มีอัตราแรงบิดสูงกว่าที่จำเป็นอย่างเคร่งครัดจะทำให้มอเตอร์เย็นลง
การสั่นสะเทือนและเสียงรบกวน สเต็ปเปอร์มอเตอร์มีลักษณะเป็นสเต็ปมอเตอร์แบบแยกส่วน แต่อาจกลายเป็นปัญหาในการใช้งานที่มีความแม่นยำได้ ปัญหาเหล่านี้จะเด่นชัดที่สุดที่ความเร็วต่ำและที่ความถี่เรโซแนนซ์ของมอเตอร์ การสั่นสะเทือนสามารถนำไปสู่การสึกหรอทางกลก่อนเวลาอันควร และลดความแม่นยำของตำแหน่งในระบบที่มีความละเอียดอ่อน วิธีแก้ไขเบื้องต้นคือการใช้ ไมโครสเต็ปปิ้ง ไดรเวอร์ซึ่งทำให้การเคลื่อนไหวระหว่างก้าวเต็มราบรื่น ช่วยลดการสั่นสะเทือนและเสียงรบกวนได้อย่างมาก ในทางกลไก การตรวจสอบให้แน่ใจว่ามอเตอร์ได้รับการติดตั้งอย่างแน่นหนาและประกอบเข้ากับโหลดอย่างเหมาะสมจะช่วยลดการสั่นสะเทือนได้ หากปัญหาการสั่นพ้องที่ความเร็วที่กำหนด ระบบควบคุมสามารถตั้งโปรแกรมให้เร่งความเร็วเหล่านั้นได้อย่างรวดเร็ว แทนที่จะทำงานอย่างคงที่ภายในความเร็วเหล่านั้น
ตำแหน่งที่ไม่ถูกต้อง ในระบบสเต็ปเปอร์แบบ open-loop มักจะระบุขั้นตอนที่หายไป สิ่งนี้เกิดขึ้นเมื่อมอเตอร์ไม่สามารถเคลื่อนที่ไปยังตำแหน่งที่ได้รับคำสั่งได้ เนื่องจากแรงบิดของโหลดเกินแรงบิดของมอเตอร์ที่มีอยู่ ระบบไม่ทราบถึงข้อผิดพลาด ทำให้เกิดการเลื่อนตำแหน่งสะสม สาเหตุที่แท้จริงมักเกิดจากแรงบิดไม่เพียงพอ คล้ายกับการหยุดนิ่ง อย่างไรก็ตาม อาจเกิดจากแรงกระแทกอย่างกะทันหันหรืออัตราการเร่งความเร็วที่มากเกินไปซึ่งต้องการแรงบิดทันทีเกินความสามารถของมอเตอร์ เพื่อป้องกันความไม่ถูกต้อง จะต้องตรวจสอบการเลือกมอเตอร์เริ่มต้นกับกราฟแรงบิด สำหรับการใช้งานที่ไม่สามารถยอมรับขั้นตอนที่พลาดได้ วิธีแก้ปัญหาที่มีประสิทธิภาพที่สุดคือการเปลี่ยนไปใช้ a มอเตอร์สเต็ปเปอร์แรงบิดสูงแบบวงปิด ระบบ ระบบนี้ใช้ตัวเข้ารหัสเพื่อตรวจสอบตำแหน่งและจะแก้ไขขั้นตอนที่พลาดโดยอัตโนมัติ เพื่อให้มั่นใจในความแม่นยำของสเต็ปเปอร์พร้อมความน่าเชื่อถือของเซอร์โว
ที่ field of สเต็ปเปอร์มอเตอร์แรงบิดสูงs ไม่คงที่ มีการพัฒนาเพื่อตอบสนองความต้องการของระบบอัตโนมัติและวิศวกรรมความแม่นยำที่ซับซ้อนมากขึ้น แนวโน้มสำคัญหลายประการกำลังกำหนดการพัฒนาในอนาคต
ความก้าวหน้าในด้านวัสดุและการออกแบบมอเตอร์ กำลังนำไปสู่การปรับปรุงความหนาแน่นของพลังงานอย่างต่อเนื่อง การใช้แม่เหล็กถาวรคุณภาพสูงกว่า เช่น นีโอไดเมียม และเหล็กเคลือบที่ได้รับการปรับปรุงสำหรับแกนสเตเตอร์และโรเตอร์ ช่วยให้ผู้ผลิตดึงแรงบิดได้มากขึ้นจากขนาดเฟรมที่กำหนด แนวโน้มไปสู่การย่อขนาดโดยไม่ลดทอนประสิทธิภาพทำให้สามารถออกแบบเครื่องจักรที่มีขนาดกะทัดรัดและมีประสิทธิภาพมากขึ้น การวิจัยเกี่ยวกับวัสดุแม่เหล็กใหม่และรูปทรงแม่เหล็กไฟฟ้าที่ได้รับการปรับปรุงให้มีประสิทธิภาพและแรงบิดที่เพิ่มมากขึ้น
บูรณาการกับระบบควบคุมขั้นสูง เป็นแนวโน้มที่โดดเด่น โดยส่วนใหญ่ได้รับแรงหนุนจากการยอมรับที่เพิ่มขึ้นของ วงปิด เทคโนโลยี ความแตกต่างระหว่างระบบสเต็ปเปอร์และเซอร์โวกำลังเบลอ สเต็ปเปอร์มอเตอร์พร้อมตัวเข้ารหัส โซลูชั่นมีความคุ้มค่าและแพร่หลายมากขึ้น ไดรเวอร์ในอนาคตจะมีอัลกอริธึมที่ซับซ้อนมากขึ้นซึ่งไม่เพียงแต่แก้ไขข้อผิดพลาดของตำแหน่งเท่านั้น แต่ยังรวมถึงการสั่นสะเทือนที่ชื้นและเพิ่มประสิทธิภาพการใช้กระแสไฟฟ้าแบบเรียลไทม์ตามโหลด การควบคุมอัจฉริยะนี้ช่วยเพิ่มประสิทธิภาพสูงสุด แรงบิดของมอเตอร์ พร้อมใช้งานในขณะที่ปรับปรุงความเรียบเนียนและประสิทธิภาพ
ที่ ความต้องการมอเตอร์แรงบิดสูงที่ประหยัดพลังงานเพิ่มขึ้น กำลังมีอิทธิพลต่อลำดับความสำคัญของการออกแบบ เนื่องจากความยั่งยืนกลายเป็นข้อกังวลหลักทางวิศวกรรม จึงมีการผลักดันให้ลดการใช้พลังงานโดยธรรมชาติของสเต็ปเปอร์มอเตอร์ ซึ่งโดยทั่วไปจะดึงกระแสไฟเต็มแม้ในขณะหยุดนิ่ง เทคโนโลยีไดรเวอร์ใหม่กำลังเกิดขึ้นซึ่งสามารถลดกระแสมอเตอร์แบบไดนามิกเมื่อเต็ม ถือแรงบิด ไม่จำเป็น จึงช่วยลดการใช้พลังงานและการสร้างความร้อนได้อย่างมากโดยไม่กระทบต่อประสิทธิภาพการทำงาน นี่เป็นสิ่งสำคัญอย่างยิ่งสำหรับการใช้งานที่ใช้แบตเตอรี่และการติดตั้งทางอุตสาหกรรมขนาดใหญ่ซึ่งต้นทุนด้านพลังงานมีความสำคัญ
สเต็ปเปอร์มอเตอร์แรงบิดสูง เป็นเทคโนโลยีการเปิดใช้งานที่สำคัญสำหรับการใช้งานสมัยใหม่ที่หลากหลาย ซึ่งต้องการการผสมผสานระหว่างการควบคุมตำแหน่งที่แม่นยำและแรงทางกลจำนวนมาก จากข้อต่อที่ประกบกันของ แขนหุ่นยนต์ สู่พลังขับเคลื่อนอันทรงพลังของ เราเตอร์ซีเอ็นซี และแอคทูเอเตอร์ที่เชื่อถือได้ใน อุปกรณ์ทางการแพทย์ มอเตอร์เหล่านี้มอบโซลูชันที่เป็นเอกลักษณ์ที่สร้างสมดุลระหว่างประสิทธิภาพ ความเรียบง่าย และความคุ้มทุน
ที่ effective selection and use of a สเต็ปเปอร์มอเตอร์แรงบิดสูง ขึ้นอยู่กับความเข้าใจอย่างถ่องแท้เกี่ยวกับความต้องการของการใช้งาน โดยเฉพาะอย่างยิ่งแรงบิดที่ต้องการตลอดช่วงความเร็วการทำงานทั้งหมด การพิจารณาปัจจัยต่างๆ อย่างรอบคอบ เช่น ขนาดมอเตอร์ ข้อมูลจำเพาะทางไฟฟ้า และสภาพแวดล้อมเป็นสิ่งสำคัญ นอกจากนี้ การบรรลุประสิทธิภาพสูงสุดนั้นเป็นไปไม่ได้หากไม่จับคู่มอเตอร์กับไดรเวอร์และแหล่งจ่ายไฟที่จับคู่กันอย่างถูกต้อง
1. บทนำ: การแยกโครงสร้างแรงม้าของมอเตอร์เหนี่ยวนำกระแสสลับ มอเตอร์เหนี่ยวนำกระแสสลับเป็นหนึ่งในม...
อ่านเพิ่มเติม1. บทนำ ในระบบอัตโนมัติทางอุตสาหกรรมสมัยใหม่ การสร้างศูนย์ข้อมูล การอัพเกรดเครื่องใช้ไฟฟ้า...
อ่านเพิ่มเติมสเต็ปเปอร์มอเตอร์ถือเป็นรากฐานสำคัญของการควบคุมการเคลื่อนไหวสมัยใหม่ โดยให้การวางตำแหน่งและการเปลี่ยน...
อ่านเพิ่มเติมภาพรวมของมอเตอร์อุตสาหกรรมอยู่ระหว่างการเปลี่ยนแปลงครั้งสำคัญ โดยได้แรงหนุนจาก ...
อ่านเพิ่มเติมสินค้าที่เกี่ยวข้อง
อาคาร 10, No.199, ถนน Jinfeng, ซูโจวไฮเทค, มณฑลเจียงซู, จีน
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 วอทส์แอพพ์
วอทส์แอพพ์
ลิขสิทธิ์ © Suzhou Retek Electric Technology Co., Ltd. สงวนลิขสิทธิ์. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













