 Get in touch
Get in touch

1. บทนำ: การแยกโครงสร้างแรงม้าของมอเตอร์เหนี่ยวนำกระแสสลับ มอเตอร์เหนี่ยวนำกระแสสลับเป็นหนึ่งในม...
อ่านเพิ่มเติมข่าวอุตสาหกรรม
2026-04-21
มอเตอร์กระแสตรง (กระแสตรง) แปลงพลังงานไฟฟ้าเป็นการหมุนเชิงกลโดยใช้ปฏิสัมพันธ์ระหว่างสนามแม่เหล็กกับตัวนำที่พากระแสไฟฟ้า หลักการทำงานเป็นไปตามกฎแรงลอเรนซ์: เมื่อกระแสไฟฟ้าไหลผ่านตัวนำที่วางอยู่ภายในสนามแม่เหล็ก ตัวนำจะมีแรงตั้งฉากกับทั้งทิศทางกระแสและทิศทางของสนาม จัดเรียงตัวนำที่มีกระแสไฟฟ้าไหลผ่านเพียงพอในชุดประกอบที่หมุนได้ และแรงนั้นจะกลายเป็นแรงบิดในการหมุนอย่างต่อเนื่อง
ในทางปฏิบัติ มอเตอร์กระแสตรงมีระบบแม่เหล็กพื้นฐานสองระบบ ที่ สเตเตอร์ ให้สนามแม่เหล็กคงที่ - ทั้งจากแม่เหล็กถาวรหรือแม่เหล็กไฟฟ้า (ขดลวดสนาม) ที่ โรเตอร์ (เรียกอีกอย่างว่ากระดอง) บรรทุกตัวนำที่เชื่อมต่อกับแหล่งจ่ายไฟ DC ภายนอก กระแสที่ไหลผ่านตัวนำโรเตอร์จะทำปฏิกิริยากับสนามสเตเตอร์เพื่อสร้างแรงบิด โดยหมุนโรเตอร์ ตราบใดที่ใช้แรงดันไฟฟ้ากระแสตรง มอเตอร์จะยังคงหมุนต่อไป
ความเร็วในมอเตอร์กระแสตรงจะถูกควบคุมโดยแรงดันไฟฟ้าที่ใช้เป็นหลัก: แรงดันไฟฟ้าที่สูงขึ้นจะทำให้การหมุนเร็วขึ้น แรงบิดเอาท์พุตเป็นสัดส่วนกับกระแสกระดอง ความสัมพันธ์ที่ตรงไปตรงมาระหว่างแรงดัน กระแสไฟฟ้า ความเร็ว และแรงบิดทำให้มอเตอร์กระแสตรงควบคุมได้ง่ายเป็นพิเศษในช่วงการทำงานที่กว้าง ซึ่งเป็นคุณสมบัติที่อธิบายความโดดเด่นอย่างต่อเนื่องในการใช้งานไดรฟ์แบบปรับความเร็วได้
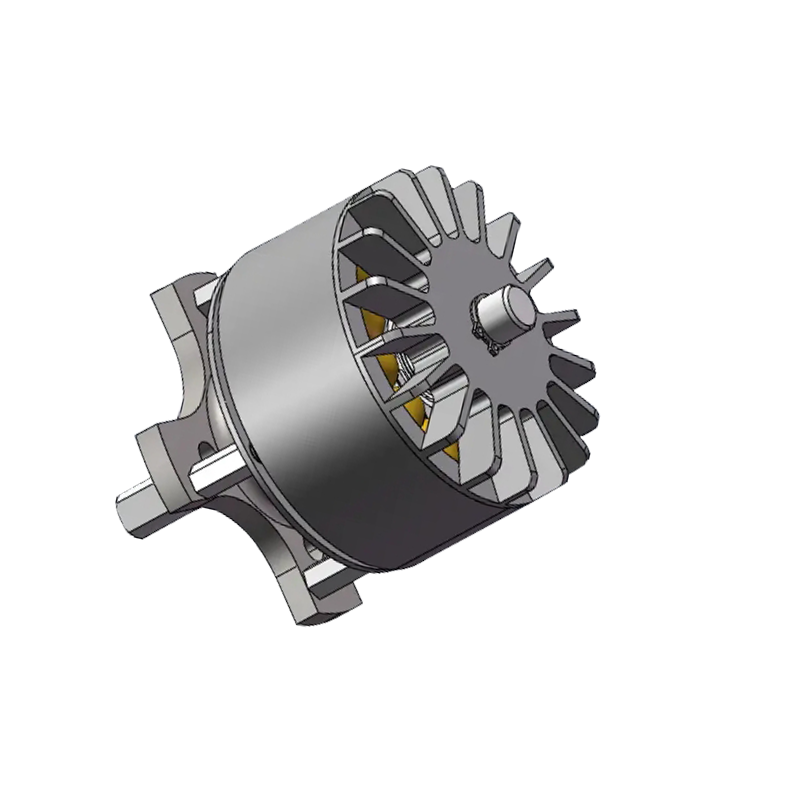
สถาปัตยกรรมภายในของมอเตอร์กระแสตรงมีความแตกต่างกันระหว่างการออกแบบแบบมีแปรงและแบบไม่มีแปรง แต่ส่วนประกอบหลักหลายประการนั้นพบได้ทั่วไปในทั้งสองประเภท
สเตเตอร์คือส่วนประกอบภายนอกที่อยู่นิ่งของมอเตอร์ ในมอเตอร์กระแสตรงขนาดเล็กและเป็นเศษส่วน สนามสเตเตอร์ถูกสร้างขึ้นโดยแม่เหล็กถาวรที่ยึดติดกับรูด้านในของตัวเรือนมอเตอร์ ในมอเตอร์กระแสตรงอุตสาหกรรมขนาดใหญ่ สเตเตอร์จะบรรทุกขดลวดสนาม ซึ่งเป็นขดลวดที่พันรอบส่วนขั้ว ซึ่งกระแสกระตุ้น DC ที่แยกจากกันจะไหลเพื่อสร้างสนามแม่เหล็ก โดยทั่วไปโครงสเตเตอร์จะเป็นเหล็กซิลิคอนเคลือบเพื่อลดการสูญเสียกระแสไหลวน
โรเตอร์คือชุดประกอบแบบหมุนที่ติดตั้งอยู่บนเพลามอเตอร์ ประกอบด้วยแกนเหล็กเคลือบที่มีร่องกลึงรอบๆ เส้นรอบวง ซึ่งขดลวดกระดองจะถูกพันเข้าไป โครงสร้างเคลือบช่วยลดการสูญเสียกระแสไหลวนในเหล็ก ในมอเตอร์กระแสตรงแบบมีแปรงถ่าน โรเตอร์จะบรรทุกคอยล์พันแผล ในมอเตอร์กระแสตรงไร้แปรงถ่าน โรเตอร์จะบรรทุกแม่เหล็กถาวรแทน
คอมมิวเตเตอร์เป็นวงแหวนทองแดงแบบแบ่งส่วนซึ่งติดตั้งอยู่บนเพลาโรเตอร์ แต่ละส่วนเชื่อมต่อกับขดลวดกระดองที่แตกต่างกัน แปรงคาร์บอน - หน้าสัมผัสแบบสปริงโหลดที่ติดตั้งอยู่ในตัวเรือนสเตเตอร์ - กดกับพื้นผิวสับเปลี่ยนและรักษาหน้าสัมผัสทางไฟฟ้าในขณะที่เพลาหมุน ขณะที่โรเตอร์หมุน ส่วนสับเปลี่ยนจะเคลื่อนผ่านใต้แปรงตามลำดับ โดยจะสลับทิศทางกระแสในแต่ละขดลวดโดยอัตโนมัติในช่วงเวลาที่เหมาะสมเพื่อรักษาแรงบิดที่กระทำในทิศทางการหมุนที่สม่ำเสมอ การสลับทางกลนี้เป็นสิ่งที่กำหนดมอเตอร์กระแสตรงแบบมีแปรงถ่าน
ขดลวดกระดองเป็นตัวนำทองแดงหุ้มฉนวนที่พันอยู่ในช่องโรเตอร์ รูปแบบการพันของขดลวด — รอบ คลื่น หรือซิมเพล็กซ์ — กำหนดจำนวนเส้นทางกระแสขนานผ่านกระดอง และส่งผลต่อคุณลักษณะความเร็ว-แรงบิดของมอเตอร์ ขดลวดสนามบนสเตเตอร์ (หากมี) จะถูกพันเพื่อสร้างจำนวนขั้วแม่เหล็กที่ถูกต้องสำหรับความเร็วการออกแบบและช่วงแรงบิด
เพลาส่งออกจะส่งแรงบิดเชิงกลไปยังโหลด ตลับลูกปืนเม็ดกลมหรือตลับลูกปืนแบบปลอกที่มีความแม่นยำสูงรองรับเพลาที่ปลายแต่ละด้านของตัวเครื่อง โดยรักษาช่องว่างอากาศระหว่างโรเตอร์และสเตเตอร์ให้อยู่ในพิกัดความคลาดเคลื่อนที่เข้มงวด ตัวเครื่อง (กระดิ่งปลายและโครง) ให้การสนับสนุนโครงสร้าง ปกป้องส่วนประกอบภายใน และในการออกแบบบางอย่างมีครีบระบายความร้อนหรืออุปกรณ์ติดตั้งสำหรับพัดลมภายนอก
ในมอเตอร์ไฟฟ้ากระแสตรงแบบมีแปรงถ่าน ตัวสับเปลี่ยนและแปรงถ่านจะทำหน้าที่เปลี่ยนกระแสไฟฟ้าโดยอัตโนมัติ ในขณะที่กระดองหมุน ส่วนสับเปลี่ยนจะเคลื่อนที่ผ่านหน้าสัมผัสแปรงที่อยู่นิ่ง โดยเชื่อมต่อคอยล์กระดองแต่ละอันเข้ากับแหล่งจ่ายตามลำดับ เพื่อให้แน่ใจว่าไม่ว่าโรเตอร์จะอยู่ที่ตำแหน่งใดก็ตาม คอยล์ที่อยู่ในตำแหน่งเดียวกับช่องว่างของขั้วสเตเตอร์จะจ่ายกระแสในทิศทางที่ถูกต้องเสมอเพื่อสร้างแรงบิดไปข้างหน้า
ผลลัพธ์ที่ได้คือมอเตอร์ที่ทำงานโดยตรงจากแหล่งจ่ายไฟ DC โดยไม่ต้องมีการเปลี่ยนทางอิเล็กทรอนิกส์ภายนอก เชื่อมต่อมอเตอร์กระแสตรงแบบมีแปรงถ่านเข้ากับแบตเตอรี่หรือแหล่งจ่ายไฟ DC แบบควบคุม แล้วมอเตอร์จะหมุนทันที กลับขั้วและกลับทิศทาง ความเรียบง่ายนี้เป็นเหตุผลหลักที่มอเตอร์แบบมีแปรงยังคงใช้กันอย่างแพร่หลายในการใช้งานที่มีความซับซ้อนต่ำถึงปานกลางโดยคำนึงถึงต้นทุน
การสัมผัสทางกลระหว่างแปรงและตัวสับเปลี่ยนทำให้เกิดข้อจำกัดที่สำคัญของมอเตอร์ แรงเสียดทานของตัวสับเปลี่ยนแปรงทำให้เกิดความร้อนและการสึกหรอ และความโค้งที่เกิดขึ้นเมื่อสวิตช์แบ่งส่วนทำให้เกิดการรบกวนทางแม่เหล็กไฟฟ้า (EMI) โดยทั่วไปจำเป็นต้องเปลี่ยนแปรงทุกๆ 1,000–5,000 ชั่วโมงการทำงาน ขึ้นอยู่กับโหลด ความเร็ว และสภาพแวดล้อมการทำงานในปัจจุบัน พื้นผิวสับเปลี่ยนยังต้องมีการตรวจสอบและพื้นผิวใหม่เป็นระยะ
มอเตอร์กระแสตรงแบบมีแปรงถ่านไม่เหมาะสำหรับการใช้งานในบรรยากาศที่ไวไฟหรือเกิดการระเบิดได้ เนื่องจากการอาร์คของแปรงถ่านสามารถจุดชนวนก๊าซโดยรอบได้ นอกจากนี้ ยังถูกจำกัดความเร็วสูงสุดด้วยข้อจำกัดทางกลของหน้าสัมผัสของแปรง-สับเปลี่ยน ซึ่งโดยทั่วไปแล้วจะอยู่ที่ 3,000–8,000 รอบต่อนาที ในการออกแบบส่วนใหญ่

มอเตอร์กระแสตรงไร้แปรงถ่าน (BLDC) กำจัดตัวสับเปลี่ยนและชุดแปรงโดยสิ้นเชิงโดยการย้ายตำแหน่งแม่เหล็กถาวรไปที่โรเตอร์และขดลวดไปยังสเตเตอร์ การสลับกระแส - การสับเปลี่ยน - ได้รับการจัดการด้วยระบบอิเล็กทรอนิกส์โดยตัวควบคุมมอเตอร์ที่ตรวจสอบตำแหน่งโรเตอร์ผ่านเซ็นเซอร์เอฟเฟกต์ฮอลล์หรือการตรวจจับ EMF ด้านหลัง และจ่ายพลังงานให้กับขดลวดสเตเตอร์ในลำดับที่ถูกต้องเพื่อรักษาการหมุน
การกลับกันทางสถาปัตยกรรมนี้มีผลกระทบที่สำคัญต่อประสิทธิภาพ การบำรุงรักษา และขอบเขตการใช้งาน
| ลักษณะเฉพาะ | มอเตอร์กระแสตรงแบบแปรงถ่าน | มอเตอร์กระแสตรงไร้แปรงถ่าน |
|---|---|---|
| วิธีการเปลี่ยน | เครื่องกล (แปรงสับเปลี่ยน) | อิเล็กทรอนิกส์ (เซ็นเซอร์ควบคุม) |
| ประสิทธิภาพ | 75–85% | 85–95% |
| การบำรุงรักษา | จำเป็นต้องเปลี่ยนแปรงเป็นประจำ | น้อยที่สุด — แบริ่งเท่านั้น |
| ช่วงความเร็ว | โดยทั่วไปสูงถึง ~8,000 RPM | สามารถหมุนได้สูงสุด 100,000 รอบต่อนาที |
| อีเอ็มไอ/อาร์ซิ่ง | การโค้งของแปรงอย่างมีนัยสำคัญ | ต่ำ (ไม่มีการสัมผัสแปรง) |
| ความเหมาะสมต่อสภาพแวดล้อมที่เป็นอันตราย | ไม่เหมาะ (การอาร์กแปรง) | เหมาะสม (ไม่มีอาร์ค) |
| ข้อกำหนดของคอนโทรลเลอร์ | การควบคุมแรงดันไฟฟ้ากระแสตรงอย่างง่าย | จำเป็นต้องมีตัวควบคุมอิเล็กทรอนิกส์เฉพาะ |
| ต้นทุนต่อหน่วย | ล่าง | สูงกว่า (ตัวควบคุมมอเตอร์) |
| อายุการใช้งาน | จำกัดด้วยการสึกหรอของแปรง | อีกต่อไป — ไม่ต้องสวมชิ้นส่วนสัมผัส |
ข้อได้เปรียบด้านประสิทธิภาพของมอเตอร์แบบไร้แปรงถ่านมีความสำคัญอย่างยิ่งในการใช้งานที่ใช้พลังงานจากแบตเตอรี่ ระบบขับเคลื่อนของรถยนต์ไฟฟ้าหรือเครื่องมือไฟฟ้าที่ใช้มอเตอร์ BLDC อย่างมีประสิทธิภาพ 92% เทียบกับมอเตอร์ไฟฟ้าที่เทียบเท่ากับแปรงที่ 80% ส่งผลให้มีระยะเวลาการทำงานต่อการชาร์จยาวนานขึ้นโดยตรง และลดภาระความร้อนบนชุดแบตเตอรี่ นี่เป็นแรงผลักดันหลักเบื้องหลังการเปลี่ยนแปลงที่แทบจะเป็นสากลไปสู่มอเตอร์ไร้แปรงถ่านในเครื่องมือไฟฟ้าไร้สาย ยานพาหนะไฟฟ้า โดรน และระบบ HVAC ในช่วงสองทศวรรษที่ผ่านมา
แม้จะมีข้อดีด้านประสิทธิภาพของการออกแบบแบบไร้แปรงถ่าน แต่มอเตอร์กระแสตรงแบบมีแปรงถ่านยังคงเป็นตัวเลือกที่ถูกต้องในการใช้งานหลายประเภท
ตัวขับเคลื่อนมอเตอร์กระแสตรง (หรือที่เรียกว่าไดรฟ์กระแสตรงหรือตัวควบคุมกระแสตรง) คือชุดอุปกรณ์อิเล็กทรอนิกส์กำลังที่ควบคุมแรงดันไฟฟ้าและกระแสไฟฟ้าที่จ่ายให้กับมอเตอร์กระแสตรงเพื่อควบคุมความเร็ว แรงบิด ความเร่ง และทิศทาง มอเตอร์และตัวขับเคลื่อนรวมกันเป็นระบบควบคุมการเคลื่อนไหวที่สมบูรณ์ โดยมอเตอร์จะให้เอาท์พุตทางกล และตัวขับเคลื่อนจะจัดการอินพุตไฟฟ้าเพื่อให้ได้โปรไฟล์การเคลื่อนไหวที่ต้องการ
ไดรฟ์ DC แบบมีแปรงถ่านแบบดั้งเดิมใช้เทคนิคการควบคุมเฟสไทริสเตอร์ (SCR) หรือ PWM (การปรับความกว้างพัลส์) เพื่อควบคุมแรงดันไฟฟ้าของกระดอง ระบบขับเคลื่อนสี่ควอแดรนท์สามารถควบคุมความเร็วและแรงบิดได้ทั้งสองทิศทางในการหมุน ช่วยให้สามารถเบรกแบบจ่ายพลังงานใหม่ได้ โดยที่มอเตอร์ทำหน้าที่เป็นเครื่องกำเนิดไฟฟ้าในระหว่างการลดความเร็ว โดยจะส่งพลังงานกลับไปยังบัสจ่ายไฟ ความสามารถนี้ใช้กันอย่างแพร่หลายในการใช้งานทางอุตสาหกรรม เช่น เครื่องม้วน โรงรีด และรอก ซึ่งการควบคุมการชะลอตัวและการนำพลังงานกลับมาใช้ใหม่
โดยทั่วไปความแม่นยำในการควบคุมความเร็วของไดรฟ์ DC แบบมีแปรงถ่านแบบวงปิดพร้อมสัญญาณป้อนกลับของมาตรวัดความเร็ว ±0.1% ของความเร็วที่ตั้งไว้ ซึ่งอธิบายการครอบงำมายาวนานในด้านการควบคุมการเคลื่อนไหวทางอุตสาหกรรมที่มีความแม่นยำ ก่อนที่ไดรฟ์ความถี่ตัวแปร AC จะครบกำหนดในปี 1990
ตัวควบคุมมอเตอร์ BLDC ทำการสับเปลี่ยนทางอิเล็กทรอนิกส์โดยการอ่านตำแหน่งโรเตอร์ ผ่านเซ็นเซอร์ฮอลล์เอฟเฟกต์ที่ฝังอยู่ในมอเตอร์หรือผ่านการประมาณค่า EMF ด้านหลังแบบไร้เซ็นเซอร์ และสลับกระแสผ่านเฟสสเตเตอร์ในลำดับที่ถูกต้อง ตัวควบคุมยังจัดการรอบการทำงานของ PWM เพื่อควบคุมความเร็วและติดตามกระแสเพื่อจำกัดแรงบิด ไดรฟ์ BLDC ที่มีความซับซ้อนมากขึ้นใช้การควบคุมเชิงสนาม (FOC) ซึ่งปรับมุมระหว่างสนามสเตเตอร์และแม่เหล็กโรเตอร์ให้เหมาะสมเพื่อให้ได้แรงบิดสูงสุดต่อแอมแปร์ตลอดช่วงความเร็วเต็ม
ในระบบการเคลื่อนไหวแบบรวม เช่น ข้อต่อหุ่นยนต์ แกนเซอร์โว และสปินเดิล CNC โดยทั่วไปมอเตอร์ BLDC และตัวขับเคลื่อนจะถูกจับคู่และปรับเข้าด้วยกันเป็นชุดที่ตรงกัน พารามิเตอร์ของไดรฟ์ รวมถึงแบนด์วิธของลูปปัจจุบัน อัตราขยายของลูปความเร็ว และระยะเวลาในการเปลี่ยนได้รับการกำหนดค่าระหว่างการทดสอบการใช้งาน และจัดเก็บไว้ในหน่วยความจำแบบไม่ลบเลือนของไดรฟ์
ภาพรวมการใช้งานสำหรับมอเตอร์กระแสตรงแบบมีแปรงถ่านและแบบไร้แปรงถ่านสะท้อนถึงจุดแข็งในด้านต้นทุน การบำรุงรักษา ช่วงความเร็ว และความแม่นยำในการควบคุม
1. บทนำ: การแยกโครงสร้างแรงม้าของมอเตอร์เหนี่ยวนำกระแสสลับ มอเตอร์เหนี่ยวนำกระแสสลับเป็นหนึ่งในม...
อ่านเพิ่มเติม1. บทนำ ในระบบอัตโนมัติทางอุตสาหกรรมสมัยใหม่ การสร้างศูนย์ข้อมูล การอัพเกรดเครื่องใช้ไฟฟ้า...
อ่านเพิ่มเติมสเต็ปเปอร์มอเตอร์ถือเป็นรากฐานสำคัญของการควบคุมการเคลื่อนไหวสมัยใหม่ โดยให้การวางตำแหน่งและการเปลี่ยน...
อ่านเพิ่มเติมภาพรวมของมอเตอร์อุตสาหกรรมอยู่ระหว่างการเปลี่ยนแปลงครั้งสำคัญ โดยได้แรงหนุนจาก ...
อ่านเพิ่มเติมสินค้าที่เกี่ยวข้อง
อาคาร 10, No.199, ถนน Jinfeng, ซูโจวไฮเทค, มณฑลเจียงซู, จีน
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 วอทส์แอพพ์
วอทส์แอพพ์
ลิขสิทธิ์ © Suzhou Retek Electric Technology Co., Ltd. สงวนลิขสิทธิ์. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













